
 扫描关注微信
扫描关注微信



1.1.3 扰动观测法原理
MPPT算法中以扰动观测法最为直观与有效。
扰动观测法的原理图如图2所示。其原理是周期性地扰动太阳电池的工作电压值(V +ΔV),再比较其扰动前后的功率变化,若输出功率值增加,则表示扰动方向正确,可朝同一方向(+ΔV)扰动;若输出功率值减小,则往相反(-ΔV)方向扰动。通过不断扰动使阵列输出功率趋于最大,然而,即使跟踪己达到最大功率点附近,扰动仍然不停止,则系统工作于动态平衡状态。算法流程示意图如图3所示。
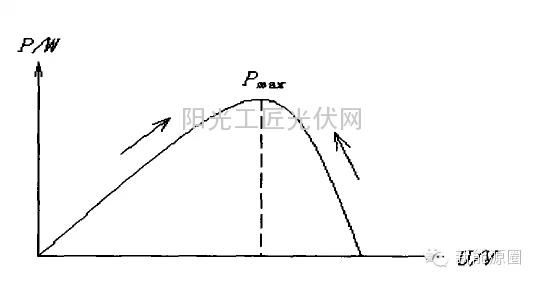
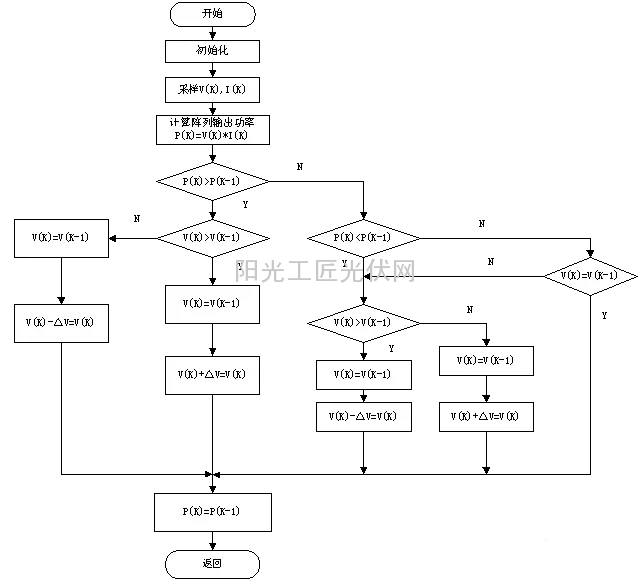
图3MPPT程序流程图
扰动观察法的最大优点是,控制概念清晰、易于实现、算法简单。但是,使用扰动观察法工作时,阵列输出功率在最大功率点附近振荡运行,导致部分功率损失,且初始值及跟踪步长的给定对跟踪精度和速度有较大影响。
1.1.4 离网逆变器
离网逆变器属于无源型单相换流装置,只能运行于逆变状态,无法运行于整流状态。
其主电路结构与并网逆变器是完全一致的,只是控制方式以及输入输出端的连接对象不同。
离网逆变器(三相)的输出应为380V50/Hz的交流电。


 宁德时代吴凯...
宁德时代吴凯... 天合光能陈奕...
天合光能陈奕... 刘岩: 追光行...
刘岩: 追光行... 黄震院士:大...
黄震院士:大...